Salut tout le monde ! On parle aujourd’hui de moteurs électriques pour le transport électrique, un sujet passionnant et crucial pour l’avenir de la mobilité. Commençons par explorer les moteurs à courant continu, ou moteurs CC.
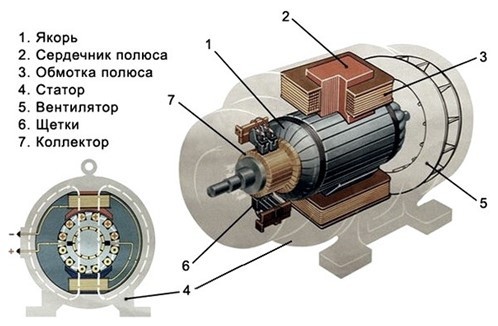
Les moteurs CC, vous savez, ceux qu’on trouvait autrefois dans beaucoup de véhicules électriques plus anciens, sont relativement simples dans leur conception. Ils fonctionnent grâce à un commutateur qui inverse le courant dans les bobines du rotor, créant ainsi un champ magnétique tournant qui interagit avec le champ magnétique statorique, produisant le mouvement. Ce système est robuste et offre un contrôle précis de la vitesse, particulièrement à basse vitesse, ce qui est idéal pour certaines applications. Cependant, ils ont aussi leurs inconvénients. L’utilisation de balais et de collecteurs, éléments mécaniques sujets à l’usure, limite leur durée de vie et leur efficacité à haute vitesse. De plus, ils sont généralement moins efficaces que les moteurs à courant alternatif, surtout pour les applications à forte puissance. On les retrouve encore dans certains véhicules électriques, notamment ceux plus petits ou ceux nécessitant un couple important à basse vitesse, mais leur utilisation tend à diminuer au profit des moteurs à courant alternatif.
Passons maintenant aux moteurs à courant alternatif, ou moteurs CA. Ces moteurs sont devenus la norme dans la plupart des véhicules électriques modernes, et pour cause ! Ils offrent une multitude d’avantages par rapport aux moteurs CC. Tout d’abord, leur conception sans balais et sans collecteur les rend beaucoup plus durables et fiables. Ils peuvent fonctionner à des vitesses beaucoup plus élevées et avec une efficacité énergétique supérieure, ce qui se traduit par une plus grande autonomie pour les véhicules. Il existe plusieurs types de moteurs CA utilisés dans le transport électrique, notamment les moteurs synchrones à aimants permanents et les moteurs asynchrones à induction. Les moteurs synchrones à aimants permanents sont connus pour leur haute densité de puissance et leur excellent rendement, mais ils peuvent être plus coûteux. Les moteurs asynchrones, quant à eux, sont plus robustes, moins chers et nécessitent moins d’entretien, mais leur rendement peut être légèrement inférieur. Le choix entre ces deux types dépendra des exigences spécifiques de l’application, comme la puissance nécessaire, le coût et les contraintes d’espace. L’innovation dans ce domaine est constante, avec des améliorations continues en termes d’efficacité, de densité de puissance et de réduction des coûts, ce qui promet un avenir encore plus prometteur pour le transport électrique. On voit de plus en plus de développements autour des moteurs à aimants permanents à haute température, permettant d’améliorer encore les performances et la durée de vie. L’intégration de l’électronique de puissance et des systèmes de contrôle sophistiqués optimise également le fonctionnement de ces moteurs, contribuant à une meilleure gestion de l’énergie et à une expérience de conduite plus agréable. Bref, les moteurs CA représentent une avancée majeure dans le domaine du transport électrique, ouvrant la voie à des véhicules plus performants, plus efficaces et plus respectueux de l’environnement.
Salut tout le monde ! Aujourd’hui, on parle moteurs électriques, plus précisément ceux qui propulsent nos véhicules électriques. On va explorer deux grandes familles : les moteurs asynchrones et les moteurs synchrones.
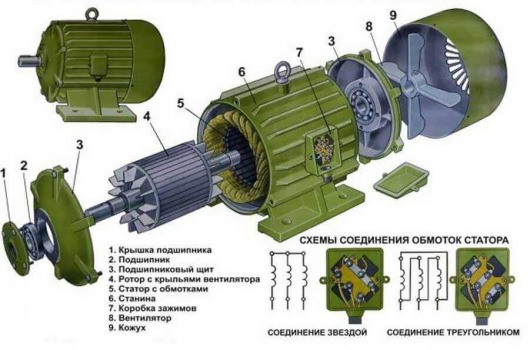
Commençons par les moteurs asynchrones, souvent appelés moteurs à induction. Ce sont des moteurs robustes, relativement simples et économiques à produire. Leur fonctionnement repose sur un principe d’induction électromagnétique : un champ magnétique tournant, créé par le stator (la partie fixe du moteur), induit un courant dans le rotor (la partie mobile). Ce courant, à son tour, génère un champ magnétique dans le rotor, qui interagit avec le champ du stator, créant ainsi le mouvement. On parle de «asynchrone» car la vitesse de rotation du rotor n’est jamais exactement égale à la vitesse du champ tournant du stator ; il y a toujours un léger glissement. Ce glissement est nécessaire pour générer le couple, la force qui fait tourner le rotor. Les moteurs asynchrones sont très utilisés dans les véhicules électriques, notamment dans les modèles plus abordables, grâce à leur simplicité et leur coût de fabrication relativement bas. Cependant, leur rendement peut être légèrement inférieur à celui des moteurs synchrones, surtout à basse vitesse. De plus, leur contrôle de vitesse peut être un peu moins précis. On retrouve souvent des moteurs asynchrones à cage d’écureuil, caractérisés par leur rotor simple et robuste, ou des moteurs asynchrones à rotor bobiné, offrant un meilleur contrôle de la vitesse mais une complexité accrue. La technologie évolue constamment, et on voit apparaître des moteurs asynchrones à haut rendement, capables de rivaliser avec les moteurs synchrones sur certains points.
Passons maintenant aux moteurs synchrones. Ces moteurs sont caractérisés par une vitesse de rotation du rotor parfaitement synchronisée avec la fréquence du courant d’alimentation. Contrairement aux moteurs asynchrones, il n’y a pas de glissement. Pour atteindre cette synchronisation, le rotor des moteurs synchrones nécessite une excitation, généralement fournie par des aimants permanents ou des bobinages alimentés en courant continu. Les moteurs synchrones à aimants permanents sont de plus en plus populaires dans les véhicules électriques, notamment dans les véhicules haut de gamme. Ils offrent un rendement élevé, une densité de puissance importante, et un excellent contrôle de la vitesse et du couple. Leur absence de balais, dans la plupart des cas, assure une grande fiabilité et une durée de vie plus longue. Cependant, le coût de fabrication des moteurs synchrones à aimants permanents peut être plus élevé que celui des moteurs asynchrones, notamment en raison du coût des aimants permanents eux-mêmes. On trouve aussi des moteurs synchrones à réluctance, qui ne nécessitent pas d’aimants permanents, ce qui réduit le coût, mais au détriment d’un rendement légèrement inférieur. Le choix entre un moteur synchrone et un moteur asynchrone dépend donc de nombreux facteurs, notamment le coût, le rendement souhaité, les performances requises et les contraintes de conception du véhicule. L’innovation dans ce domaine est constante, et on peut s’attendre à voir de nouvelles avancées technologiques dans les années à venir, permettant d’optimiser encore davantage les performances et le coût de ces moteurs essentiels à la mobilité électrique.